
1. 为什么灵巧手是人形机器人的核心部件
1.1 应用层面:人形概念的具现式
传统机器人末端执行器通常采用夹爪,在灵活性、精准度方面较为有限。末端执行器是机器人进行作业的执行部件,具体形态涵盖夹持器、抓持手、灵巧手等,不同形态的末端执行器均有其各自的适配场景,通常安装于机器人腕部的末端。传统末端执行器如夹爪、抓持手具备低成本和高稳定性等优势,已成为医疗检测、3C 装配等领域的主流应用。相较于传统末端执行器,人形机器人的灵巧手通过模仿人手进行设计,需要负责完成多样化的非标任务,因此在灵活性、精准度等方面要求较高。灵巧手因其结构与人手相似,因此灵巧手也成为人形机器人概念的具现式。
灵巧手泛化能力强,在多场景中均拥有较大应用潜力。传统夹爪或抓持手已经在工业装配、医疗检测等领域实现应用,但由于其仅针对标准化流程进行设计,因此泛化能力有限。灵巧手结构与人手相似,具有高自由度、高精度等特点,可以与人形机器人搭配执行多种复杂任务,如抓握小型物体、搬运物品等,在工业场景、商业场景、家用场景中均有较大的应用潜力。
1.2 成本层面:灵巧手占整机成本比重约为17%
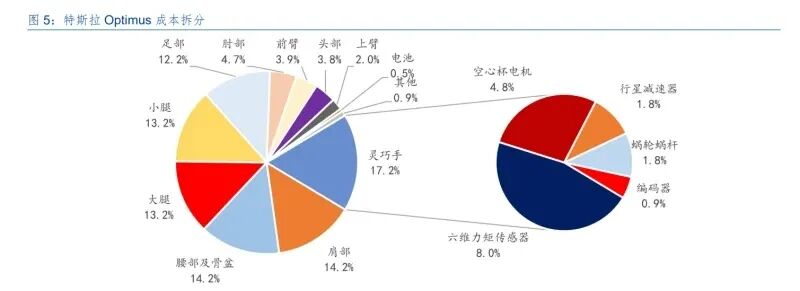
灵巧手约占整机成本 17%,成本层面灵巧手是整机最重要的部件之一。以特斯拉Optimus为例,从整机各部位的成本拆分来看,灵巧手成本占比约为 17.2%,占最大比重,其中空心杯电机、六维力传感器分别占比 4.8%/8.0%,行星减速器、蜗轮蜗杆、编码器分别占比1.8%/1.8%/0.9%,空心杯电机与六维力矩传感器是灵巧手中的核心部件。
1.3 迭代层面:灵巧性、感知力提升拓展能力边界
高自由度以及高感知能力逐步拓展人形机器人应用功能。由于人形机器人产业尚未规模化落地,当前灵巧手技术路线并未收敛,但整体趋势朝着更高灵巧性以及更强感知能力的方向发展。以特斯拉 Optimus 灵巧手为例,从第一代灵巧手迭代至第三代灵巧手的过程中,单手自由度从11 个增加至 22 个,早期感知方案仅包含力+位置传感器,不配备触觉传感器,而第三代灵巧手已全手覆盖触觉传感器并集成 AI 视觉实现动态抓取。随着灵巧手在自由度以及感知能力方面的持续迭代,Optimus 的应用功能也从早期的基础任务,如抓取水壶、运动货箱,逐步拓展至更复杂的动态任务,如接住飞行网球、弹奏乐器等。
雷赛智能灵巧手朝着更多自由度的方向持续迭代。雷赛智能在2025 年具有较为清晰的灵巧手迭代规划,2025Q1 的 DH116 普及型自由度为 11 个,可支持20 种手势数量;2025Q2发布的 DH2015 高端型自由度提升至 20 个,手势数量提升至 26 个;DH2016 高端PLUS型拥有更多主动自由度;DH240 旗舰型提升至 24 个自由度,并且支持高达33 种手势数量,产品整体朝着更高自由度的方向持续迭代。
2. 灵巧手由驱动、传动、感知三大模块组成
2.1 电机驱动为灵巧手主流驱动方案
电机驱动符合人形机器人灵巧手需求,为目前主流方案。电机驱动系统集成了空心杯电机、无刷有槽电机、减速器等零部件,由于其体积小、响应快、调控方便、输出力矩稳定等优点在灵巧手控制中应用较为广泛。 空心杯电机是灵巧手电机驱动方式的核心零部件。与传统电机相比,空心杯电机采用了无铁芯的转子设计,避免了电机在运行过程中产生的涡流效应,而涡流效应会导致电机升温、扭矩波动以及能量损失。人形机器人灵巧手具有高自由度、高精度以及快速响应能力的需求,空心杯电机凭借其体积小、精度高、重量轻的特点成为了灵巧手电机的主流选择。
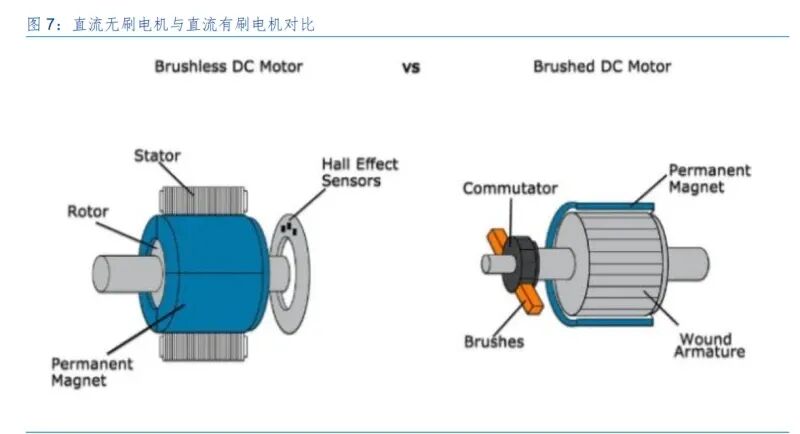
直流无刷电机也是灵巧手设计方案中的重要零部件,相较于直流有刷电机,直流无刷电机的特点主要体现在: 1) 无刷电机使用寿命方面更长:由于没有机械刷子的磨损,无刷电机的使用寿命更长、更持久,特别在高速运行和恶劣环境条件下,并且运行噪音更小;2) 无刷电机转速更高:具有较好的响应速度和控制性能,可以通过调节电子传感器就可以控制其转速; 3) 无刷电机有较高的转换效率:由于没有电刷摩擦带来的能量损失,具有较高的转换效率,与传统有刷电机相比,效率大大提高; 4) 无刷电机有优秀的控制性能:采用电子换相控制,可以实现精确的速度控制和扭矩控制,具有快速响应的能力。
液压驱动扭矩大,但在小型化及便携性方面存在缺点。液压驱动的灵巧手由液动机、伺服阀、油泵和油箱等组成,通常用于工业领域,液压系统具有较大抓取力,适用于驱动大型负载,但在小型化、便携性方面仍存在问题。 气压驱动操作简便,但灵活性较差。气压驱动系统使用气体作为介质,模拟人体肌肉的驱动方式,优点是易于控制、能量储存方便、系统柔性好,缺点是刚度低、动态性能差、装配难度大、运动不够精确,限制了其在工业生产中的广泛应用,常用在简单的抓持手,不能实现多关节的灵活运动。 形状记忆金属反应快,但疲劳强度低。形状记忆金属利用SMA 材料在特定温度下恢复原状的特性进行驱动,优点是位移大、功率重量比高、变位迅速、方向灵活,适合高速度和高精度的小负载装配任务,缺点是成本高、易疲劳、寿命较短。
2.2 传动方式:技术方案未收敛,短期内多方案并存
腱绳传动可实现远距离动力传递。放置于灵巧手前臂中的电机通过齿轮箱驱动滚珠丝杠,通过滚珠丝杠上的螺母将旋转运动转化为直线运动,腱绳形成一个腱环套在螺母上,螺母拉动连接在灵巧手手指指骨上的腱绳,实现手指饶关节轴的转动运动。腱绳传动模拟人类手部的肌腱分布,采用各类材料与剑鞘或套管配合在手臂、手掌和手指内部灵活走线,结构较为紧凑并具有一定弹性,为手指运动提供一定程度的柔顺性和抓持适应性,可实现远距离的动力传递。
腱绳传动具备较高柔性,但精度控制较难。腱绳传动因布置形式多变而拥有多种不同的结构,如腱-腱鞘式、等径滑轮式、带轮传动式等,由于腱绳具有较高的柔性以及较小的尺寸,因为腱绳传动系统对驱动器和减速机构的结构尺寸要求较低。腱绳传动需要对绳索机构进行预紧并且所有绳索具备弹性,因此传感器无法准确反应手指关节位置的信息,精度控制难度较高,容易磨损,通常适用于多自由度和轻量化设计。
连杆传动可实现高强度抓取,但自身较重。连杆传动方式结构简单、刚性高,手指的运动和动力由刚性连杆传递,可以实现高强度抓取动作,结构设计紧凑,可完成包络抓取,但自身重量较大,同时在远距离的控制方面难度较高,多个连杆串并联混合的使用形式常用于工业和商业场景。
齿轮传动精度高,但体积与质量较大。齿轮传动通过齿轮间的精密啮合提升精度,拥有稳定传动比,传递效率高,可靠性强,但齿轮结构增大了灵巧手本身的质量和体积,常用于耦合关节来确保运动同步性。
灵巧手传动技术路线尚未收敛,短期内多方案并存。目前人形机器人行业的灵巧手传动技术方案并未收敛,腱绳、连杆、齿轮等传动方式因其各自的特点均被主流整机企业使用,如特斯拉Optimus 采用腱绳方案,宇树 Dex5 灵巧手采用齿轮方案,因时机器人采用连杆传动方案,短期内腱绳、连杆、齿轮等方案预计仍将并存。
2.3 感知方式:传感器为灵巧手对外交互的重要窗口
六维力传感器与柔性触觉传感器是人形机器人增强感知能力的关键。内部感知涵盖对灵巧手运动参数的检测,如位置、速度、加速度等;外部感知涵盖对周围环境的信息检测,常见的传感器有力/力矩传感器、视觉传感器、触觉传感器、温度传感器等。通过对灵巧手内外部的物理参数的精准测量,传感器为灵巧手的运动控制提供了重要的信息反馈。我们认为在目前阶段,六维力传感器以及柔性触觉传感器(电子皮肤)是人形机器人提升感知能力的关键。力传感器可分为一维、三维和六维力,六维力传感器适用于机器人等高精度要求的场景。力觉传感器,顾名思义就是感知并度量力的传感器。力传感器按测量维度可以分为三类:一维力传感器,三维力传感器和六维力传感器。一维力传感器适用于测量轴线和力的方向完全重合的场景;三维力传感器适用于力的作用点固定,且与标定参考点重合,但力的方向随机变化的场景。六维力传感器适用于力的作用点和方向均随机变化的场景,比如机器人末端关节控制。六维力矩传感器通过内部算法,实现各个方向力与力矩的解耦,推算部件的姿态,测量精度最高,还可以根据力矩大小,有效保护传感器与部件。
柔性触觉传感器能够模仿人类皮肤,实现对多种物理量的检测。触觉传感器通过物理接触的方式来实现对特定物体的测量,触觉传感器也是实现机器人仿生感知以及智能交互的核心部件,其中柔性电子技术的突破以及纳米技术的发展使得性能优越、结构简单的柔性触觉传感器成为了能够模仿人类皮肤特性的传感器件。柔性触觉传感器能够检测包括应力、应变、剪切力以及振动等,根据工作原理的不同主要可分为压阻式、电容式、压电式和摩擦电式柔性触觉传感器。
压阻式柔性触觉传感器结构简单、能耗低、易读取、检测范围宽。压阻式柔性触觉传感器的工作原理是通过材料的压阻效应,将机械信号转化为电信号来对应变进行检测,电阻信号与材料的拉伸应力具有线性关系,常用材料有碳材料、导电织物等。电容式柔性触觉传感器具有快速响应和高灵敏度的优势。电容式柔性触觉传感器的工作原理为将机械刺激转化为电容变化,当传感器受到垂直于电极方向的应力时,两个分离的电极之间的距离变化会带动电容发生变化。电容式柔性触觉传感器的性能会随着电介质层的材料变形面积或厚度的变化而发生变化,灵敏度会随着器件尺寸的减小而迅速下降,常用材料包含碳基材料、水凝胶材料、金属基材料等。
压电式柔性触觉传感器无需外接电源,可实现自供电。压电式柔性触觉传感器的工作原理是将施加到器件上的力使得压电材料变形,材料内部产生电荷的极化,从而在相对表面上产生电荷,当施加的力撤去时,材料恢复到其原始状态,电荷消失。由于压电式柔性触觉传感器无需外接电源,在可穿戴方面拥有广阔的应用前景。 摩擦电式柔性触觉传感器具有高灵敏度、高响应速度以及自供电等多种优点。摩擦电式柔性触觉传感器由极性相反的两种摩擦材料组成,两个电极分别放置在两个摩擦电材料的表面,当两种材料相互接触时,由于带电体静电感应的耦合效应,材料表面会产生相反的静电荷,分离之后,静电感应会产生感应电荷。材料的接触和分离会产生电势差,从而导致电子通过外部电路传输,完成触觉机械信号到电信号的转化。
3. 主要整机企业灵巧手方案
3.1 人形机器人灵巧手的研发逐步从科研机构迈向产业
人形机器人灵巧手的研发逐步从科研机构迈向产业。历史上机器人灵巧手多为三指、四指及五指,自由度在 10-20 个不等,少数灵巧手自由度在 20 个以上。随着人形机器人产业的加速发展,海内外多家整机企业及零部件企业均开始研究及生产人形机器人灵巧手产品。
3.2 灵巧手产品百花齐放
灵巧手持续迭代,更高自由度带来更大应用潜力。部分整机企业自研灵巧手,整体朝着更高自由度以及更强感知能力的方向去迭代,进而拓展灵巧手应用场景,如特斯拉Optimus的灵巧手自由度从 11 个迭代至 22 个,早期仅能完成较少的动作,但第三代灵巧手已经能够完成接网球等复杂动作。宇树科技的 DEX3-1 仅拥有 7 个自由度,而DEX5-1 已拥有20个自由度,应用潜力实现大幅提升。
1) 特斯拉: 特斯拉 Optimus 的第一代灵巧手于 2022 年 10 月发布,单手拥有11 个自由度(6主动+5被动),采用“2 指少一关节”的简化设计,灵巧手通过 6 个空心杯电机模组(空心杯电机+行星减速箱+编码器)来进行驱动,拇指分配 2 个执行器,其他四指各1 个。灵巧手采用金属腱绳+蜗轮蜗杆的传动方式,模拟人体肌腱结构实现柔性抓取,蜗轮蜗杆提供自锁功能以减少功耗,拥有较大的抓取力,缺点是缺少侧摆自由度,没有办法实现精密抓取。感知能力方面,第一代灵巧手仅配置基础力传感器和位置传感器,无触觉反馈。
特斯拉 Optimus 的第二代灵巧手于 2023 年 12 月发布,单手继续保持11 个自由度,但优化了关节控制逻辑。灵巧手延续空心杯电机模组的驱动方案,但提升扭矩控制精度,继续沿用腱绳+蜗轮蜗杆的传动方式,增强传动的稳定性和力量输出。感知能力方面,第二代灵巧手首次引入触觉传感器,覆盖指尖区域,实现精细力控与摩擦力感知。
2024 年 10 月,特斯拉发布 Optimus 第三代灵巧手,单手自由度翻倍至22个(17主动+5被动), 单指三级传动。其中灵巧手的食指、中指、无名指分别具有4 个自由度,拇指以及小指分别具有 5 个自由度,接近人手的 24 个自由度。驱动方案采用直流无刷电机+丝杠方案,执行器外移至前臂,单手执行器数量或增至 17 个,显著提升控制精度与负载能力(单指负载达25公斤)。传动方案采用丝杠替代蜗杆与腱绳组成复合传动系统,丝杠提升动力传输效率,腱绳实现远距离柔性驱动。感知能力方面,第三代灵巧手全手覆盖触觉传感器(如特斯拉展示的“接网球”动作依赖实时触觉反馈),并集成 AI 视觉系统实现动态抓取。
2) 宇树科技: 宇树目前拥有 Dex3-1 和 Dex5-1 两款灵巧手产品,其中Dex3-1 拥有7 个自由度(拇指*3、食指*2、中指*2)和 7 个运动关节,传动机构为 6 个微型无刷利空关节直驱和1个微型无刷力控关节齿轮驱动,单手搭配 33 个触觉传感器,可搭配宇树科技的G1 人形机器人使用从而各种复杂动作。 Dex5-1 拥有单手 20 个自由度(拇指*4、食指*3、中指*3、无名指*3、小拇指*3),包含16个主动自由度和 4 个被动自由度,每根手指的所有关节自由度均支持反向驱动。传动机构为12个自研微型力控复合传动关节(可实现机器人无触觉本体感知)和4 个微型力控关节齿轮传动,单手拥有 94 个触觉传感器并支持灵巧手触觉算法的二次开发。

3) 优必选:优必选全新一代工业机器人 Walker S2 的灵巧手拥有 11 个自由度,搭载6个阵列式触觉压力传感器,得益于灵巧手的高强度轻量化设计,Walker S2 不仅能够实现亚毫米级精密操作,还可在 0-1.8 米的全空间范围内托举 15kg 的重物, 满足工业级搬运的作业需求。
3.3 灵巧手零部件需求高速增长
多样化灵巧手产品涌现,多维度赋能人形机器人。部分零部件企业深耕灵巧手产品,如强脑科技 Revo2 配备多维触觉感知能力,支持 OTA 在线升级,帮助人形机器人应用场景加速落地;帕西尼 DexH13 GEN2 相较于 DexH5 GEN1 拥有更多自由度,同时配备800 万像素高清AI手眼相机,通过零样本位姿估计视觉算法实现对物体位置、形态等信息的精准识别,帮助人形机器人拓展物流仓储、医疗康养、工业制造、商业服务和家庭服务等场景;灵心巧手则拥有一系列灵巧手产品来满足各类人形机器人的应用需求,适应各类开放式通用场景,高效赋能人形机器人产业化落地。
4) 星动纪元: 星动纪元的 XHAND1 灵巧手拥有 12 个主动自由度(拇指*3、食指*3、其余手指*2),相较于行业主流的欠驱动方案,XHAND1 采用纯齿轮准直驱传动,每个关节均可反驱,免于被掰坏或受意外冲击损坏的风险,抗冲击能力更强。XHAND1 单指最大负载达到5kg以上,整手可以举起 25kg 的重物,食指拥有侧摆自由度,因此可做旋拧的动作,另外拇指还能够与小指实现指对指从而增强抓握的稳定性,赋予灵巧手更多执行复杂任务和精细操作的可能。XHAND1每个指尖均配有阵列式高精度高分辨率触觉传感器,每个指尖上采集120-300 个均匀分布的三维力信息,最小分辨率为 0.05N,可以支持机器人做更精准的力控,同时拥有更多的感知能力比如接触觉、滑动感知,并通过面阵力的解算可以得到接触面表面纹理等更多信息;每个触觉传感器上有 20 个分布的温度阵列,可以感知到接触物体的温度。
5) 魔法原子: 魔法原子自研灵巧手 MagicHand S01 单手具备 11 个自由度,手部负载高达5kg,作业场景下的最高负载超 20kg,力分辨率最高可达 0.1N,能够从容实现自主抓握和精细操作,可满足工业、商业、家庭等多种场景的落地应用需求。
6) 灵巧智能: 灵巧智能的 DexHand 021 量产版是商用高自由度多模态感知的智能通用灵巧手,单手拥有19 个自由度(12 主动+7 被动),单指负载力达到 1kg,5 根手指均可实现独立更换,配备位置、触觉和力觉传感器。DexHand 021 量产版拥有多样化的操作能力,如掌内转动魔方、多物体抓取、柱状抓握、球形抓握、多指捏夹等超 15 种类人手功能操作。
7) 因时机器人: 因时机器人的末端执行器包含 RH56BFX 系列、RH56DFX 系列、RH56E2系列灵巧手以及EG2-4B 系列和 EG2-4C 系列伺服电动夹爪。其中 RH56DFX 系列为仿人五指灵巧手,单指抓握力达到 1.5kg,±0.2mm 重复定位精度、0.5N 力分辨率,另外整手重量仅540g。因时机器人的灵巧手可实现抓取鸡蛋、水果、杠铃、以及握持杯子、工具等动作,可满足精细化作业需求。
8) 强脑科技: 强脑科技拥有两款仿生灵巧手产品 Revo1 和 Revo2,其中Revo1 单手承载高达30KG,单手主动握力 6KG。Revo 1 触觉版灵巧手实现仿人三维曲面造型和触觉布局,通过指尖触觉感知多维度信息,如压力、摩擦力、受力方向、接近距离、表面材质等。每个手指有三个触觉感应点,每个感应点能感应三维力和接近觉,实现 11 个通道的多维触觉感知数据实时采集,最小识别力≤1g,精度可达到 0.01N,线性度高,同时采样频率大于 50HZ,实时反馈更快,精准度更高。Revo2 是基于假肢手与 Revo 1 灵巧手的成熟技术迭代升级,内置6 个电机,具备6个主动关节, 共有 11 个自由度。单手重量 383g,尺寸 160mm,主动握力50N,单手负载20kg,极致负载同时做到轻量小巧,外观仿生美观。Revo 2 灵巧手可配备多维触觉感知能力,具备自定义手势,多重保护,伺服控制算法,触觉自适应抓握,OTA 在线升级等等,助力快速实现灵巧场景落地。

9) 帕西尼: 帕西尼目前拥有两款多维触觉灵巧手 DexH5 GEN1 和 DexH13 GEN2。DexH5GEN1为四指灵巧手,拥有 9 个自由度(5 主动+4 被动),采用空心杯电机驱动,融合轻量化高强度复合材料与仿生结构设计,整体造型轻巧灵活,负载可达到 4kg,单手集成396 颗ITPU多维触觉传感单元,能够实现握、捏、按等人手基础动作。 DexH13 GEN2 为帕西尼全新一代多维触觉灵巧手,拥有16 个自由度(13主动+3被动),同时也是业内首款多维触觉+AI 视觉双模态灵巧手,产品配备800 万像素高清AI 手眼相机,通过零样本位姿估计视觉算法实现对物体位置、形态等信息的精准识别。DexH13 GEN2搭载1140颗专业级机器人 ITPU 触觉传感单元,可实现 1mm 按压定位精度。除此以外,DexH13GEN2负载可达到 5kg,拥有超百万次按压的使用寿命,可应用于物流仓储、医疗康养、工业制造、商业和家庭服务等场景。
10) 灵心巧手: 灵心巧手的灵巧手产品持续迭代,陆续推出了 L10、L20、L30 以及高性价比版本的O7,单手自由度可达 7-25,而科研版 L30 拥有全球最高 42 个自由度,适应各类开放式通用场景,高效赋能人形机器人产业化落地。 Linker Hand L10:20 个自由度(10 主动+10 被动),最大负载5kg,重复定位精度±0.20mm,拇指和四指最大抓握力均为 12N; Linker Hand L20:20 个主动自由度,最大负载 5kg,重复定位精度±0.20mm,拇指最大抓握力为 15N, 四指最大抓握力为 10N; Linker Hand L30 直驱版:21 个主动自由度,最大负载 20kg,重复定位精度±0.20mm,拇指最大抓握力为 15N,四指最大抓握力为 10N; Linker Hand L30 腱驱版:25 个自由度(18 主动+7 被动),最大负载超8kg,重复定位精度±0.20mm,拇指最大抓握力为 9-20N,四指最大抓握力为 10-20N;Linker Hand O7:17 个自由度(7 主动+10 被动),最大负载5kg,重复定位精度±0.20mm,拇指和四指最大抓握力均为 12N。
11) 兆威机电: 兆威机电的仿生灵巧手集结构、软硬件系统研发于一体,拥有17 个主动自由度,负载达到3kg,指节电机 独立驱动,指尖集成传感器,实现精确定位和控制。产品主要应用于机器人领域,可与各种柔性机器人配合使用,具有多自由度和高功率密度的特点,可完成复杂灵巧的抓握动作。
12) 雷赛智能: 雷赛智能的灵巧手产品持续迭代,目前最新产品为 2025 年6 月发布的DH2015高端型,其拥有 20 个自由度(15 主动+5 被动),采用无刷空心杯伺服电机、FOC电流环与力位混合控制算法,耐碰撞结构设计,抓握寿命超过 100 万次,标配触觉传感器(508 点阵),整手最大负载可达 15kg,单指最大负载 5kg,胜任多样化抓取任务。
3.4 2035 年灵巧手行业空间有望达到1356.74 亿元
报告全文可扫描下方图片二维码进入星球社群查阅下载 ]article_adlist--> (报告来源:华金证券。本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)
(报告来源:华金证券。本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)我们组建了研究报告知识星球社群,加入后您可以享受以下服务:
1、星球中分享最新、专业、深度有价值的行业研究报告、投行报告、白皮书、蓝皮书、公司研报等。报告持续更新;
2、会员可以用提问方式单独获取需要的报告,满足个性化需求;
3、星球中海量研究报告PDF高清版,无限制下载;
4、4000+会员使用的研究报告宝库值得您信赖;
扫描下方二维码加入星球 ]article_adlist-->
业务咨询、商务合作:136 3162 3664(同微信)
温馨提示
应广大粉丝要求,「报告研究所」成立了报告交流群,欢迎各位公司、企业、投行、投资机构、政府机构、基金、创业者朋友加入!
这里能且不限于:“每日分享多篇研究报告、行业交流、报告交流、信息交流、寻求合作等......”
入群方式:添加助理微信【touzireport666】配资好评配资门户,发送「个人纸质名片」或「电子名片」审核后即可入群。
 海量资讯、精准解读,尽在新浪财经APP
海量资讯、精准解读,尽在新浪财经APP
配资盘提示:文章来自网络,不代表本站观点。
相关文章


热点资讯